Note
Go to the end to download the full example code.
Convolution¶
This example shows how to use the pylops.signalprocessing.Convolve1D,
pylops.signalprocessing.Convolve2D and
pylops.signalprocessing.ConvolveND operators to perform convolution
between two signals.
Such operators can be used in the forward model of several common application in signal processing that require filtering of an input signal for the instrument response. Similarly, removing the effect of the instrument response from signal is equivalent to solving linear system of equations based on Convolve1D, Convolve2D or ConvolveND operators. This problem is generally referred to as Deconvolution.
A very practical example of deconvolution can be found in the geophysical processing of seismic data where the effect of the source response (i.e., airgun or vibroseis) should be removed from the recorded signal to be able to better interpret the response of the subsurface. Similar examples can be found in telecommunication and speech analysis.
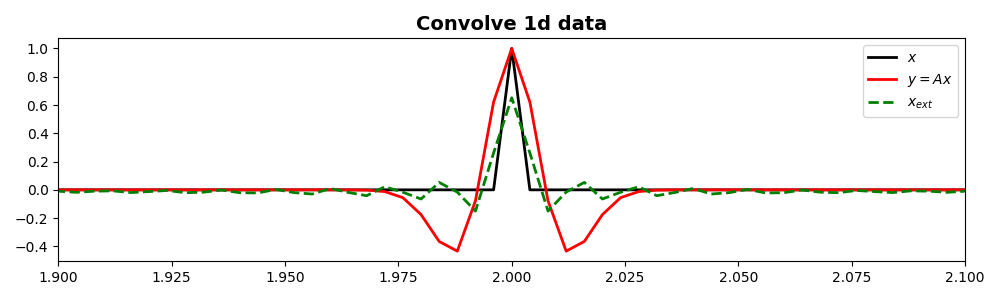
We will start by creating a zero signal of lenght \(nt\) and we will
place a unitary spike at its center. We also create our filter to be
applied by means of pylops.signalprocessing.Convolve1D operator.
Following the seismic example mentioned above, the filter is a
Ricker wavelet
with dominant frequency \(f_0 = 30 Hz\).
nt = 1001
dt = 0.004
t = np.arange(nt) * dt
x = np.zeros(nt)
x[int(nt / 2)] = 1
h, th, hcenter = ricker(t[:101], f0=30)
Cop = pylops.signalprocessing.Convolve1D(nt, h=h, offset=hcenter, dtype="float32")
y = Cop * x
xinv = Cop / y
fig, ax = plt.subplots(1, 1, figsize=(10, 3))
ax.plot(t, x, "k", lw=2, label=r"$x$")
ax.plot(t, y, "r", lw=2, label=r"$y=Ax$")
ax.plot(t, xinv, "--g", lw=2, label=r"$x_{ext}$")
ax.set_title("Convolve 1d data", fontsize=14, fontweight="bold")
ax.legend()
ax.set_xlim(1.9, 2.1)
plt.tight_layout()
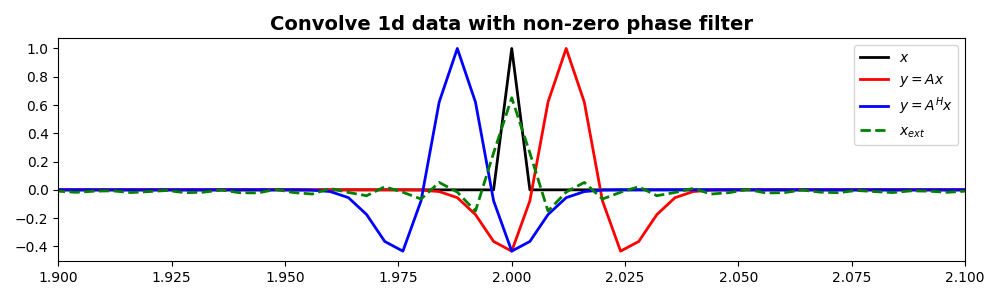
We show now that also a filter with mixed phase (i.e., not centered
around zero) can be applied and inverted for using the
pylops.signalprocessing.Convolve1D
operator.
Cop = pylops.signalprocessing.Convolve1D(nt, h=h, offset=hcenter - 3, dtype="float32")
y = Cop * x
y1 = Cop.H * x
xinv = Cop / y
fig, ax = plt.subplots(1, 1, figsize=(10, 3))
ax.plot(t, x, "k", lw=2, label=r"$x$")
ax.plot(t, y, "r", lw=2, label=r"$y=Ax$")
ax.plot(t, y1, "b", lw=2, label=r"$y=A^Hx$")
ax.plot(t, xinv, "--g", lw=2, label=r"$x_{ext}$")
ax.set_title(
"Convolve 1d data with non-zero phase filter", fontsize=14, fontweight="bold"
)
ax.set_xlim(1.9, 2.1)
ax.legend()
plt.tight_layout()
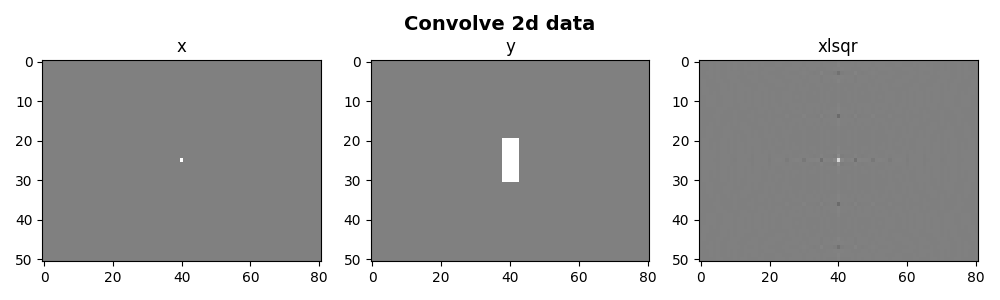
We repeat a similar exercise but using two dimensional signals and
filters taking advantage of the
pylops.signalprocessing.Convolve2D operator.
nt = 51
nx = 81
dt = 0.004
t = np.arange(nt) * dt
x = np.zeros((nt, nx))
x[int(nt / 2), int(nx / 2)] = 1
nh = [11, 5]
h = np.ones((nh[0], nh[1]))
Cop = pylops.signalprocessing.Convolve2D(
(nt, nx),
h=h,
offset=(int(nh[0]) / 2, int(nh[1]) / 2),
dtype="float32",
)
y = Cop * x
xinv = (Cop / y.ravel()).reshape(Cop.dims)
fig, axs = plt.subplots(1, 3, figsize=(10, 3))
fig.suptitle("Convolve 2d data", fontsize=14, fontweight="bold", y=0.95)
axs[0].imshow(x, cmap="gray", vmin=-1, vmax=1)
axs[1].imshow(y, cmap="gray", vmin=-1, vmax=1)
axs[2].imshow(xinv, cmap="gray", vmin=-1, vmax=1)
axs[0].set_title("x")
axs[0].axis("tight")
axs[1].set_title("y")
axs[1].axis("tight")
axs[2].set_title("xlsqr")
axs[2].axis("tight")
plt.tight_layout()
plt.subplots_adjust(top=0.8)
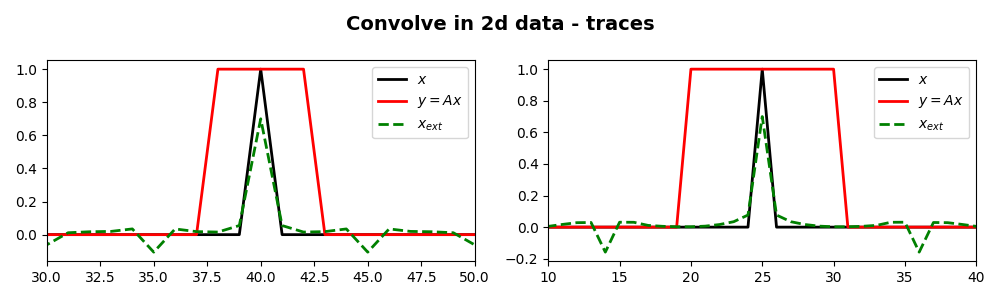
fig, ax = plt.subplots(1, 2, figsize=(10, 3))
fig.suptitle("Convolve in 2d data - traces", fontsize=14, fontweight="bold", y=0.95)
ax[0].plot(x[int(nt / 2), :], "k", lw=2, label=r"$x$")
ax[0].plot(y[int(nt / 2), :], "r", lw=2, label=r"$y=Ax$")
ax[0].plot(xinv[int(nt / 2), :], "--g", lw=2, label=r"$x_{ext}$")
ax[1].plot(x[:, int(nx / 2)], "k", lw=2, label=r"$x$")
ax[1].plot(y[:, int(nx / 2)], "r", lw=2, label=r"$y=Ax$")
ax[1].plot(xinv[:, int(nx / 2)], "--g", lw=2, label=r"$x_{ext}$")
ax[0].legend()
ax[0].set_xlim(30, 50)
ax[1].legend()
ax[1].set_xlim(10, 40)
plt.tight_layout()
plt.subplots_adjust(top=0.8)
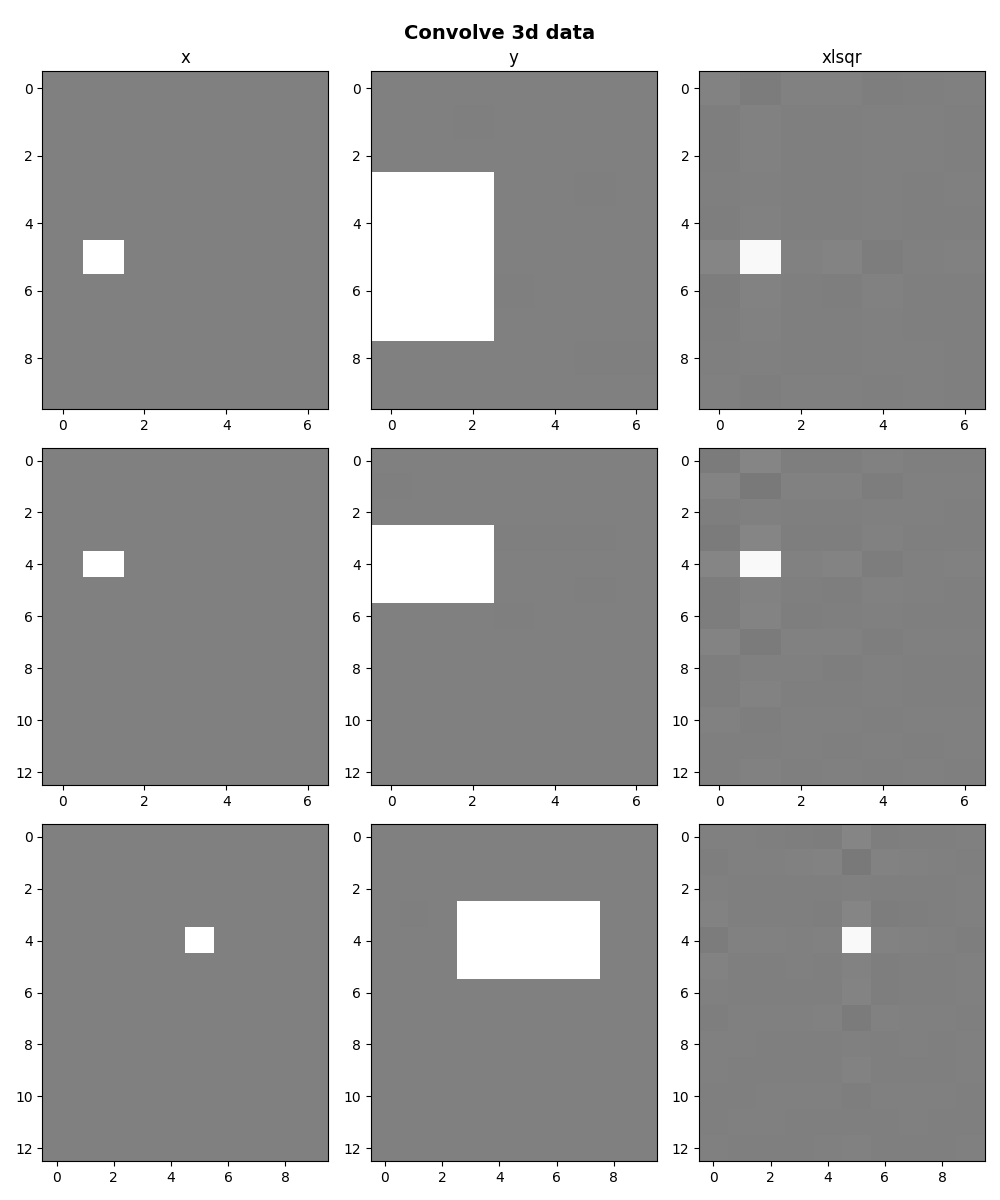
We now do the same using three dimensional signals and
filters taking advantage of the
pylops.signalprocessing.ConvolveND operator.
ny, nx, nz = 13, 10, 7
x = np.zeros((ny, nx, nz))
x[ny // 3, nx // 2, nz // 4] = 1
h = np.ones((3, 5, 3))
offset = [1, 2, 1]
Cop = pylops.signalprocessing.ConvolveND(
dims=(ny, nx, nz), h=h, offset=offset, axes=(0, 1, 2), dtype="float32"
)
y = Cop * x
xlsqr = lsqr(Cop, y.ravel(), damp=0, iter_lim=300, show=0)[0]
xlsqr = xlsqr.reshape(Cop.dims)
fig, axs = plt.subplots(3, 3, figsize=(10, 12))
fig.suptitle("Convolve 3d data", y=0.98, fontsize=14, fontweight="bold")
axs[0][0].imshow(x[ny // 3], cmap="gray", vmin=-1, vmax=1)
axs[0][1].imshow(y[ny // 3], cmap="gray", vmin=-1, vmax=1)
axs[0][2].imshow(xlsqr[ny // 3], cmap="gray", vmin=-1, vmax=1)
axs[0][0].set_title("x")
axs[0][0].axis("tight")
axs[0][1].set_title("y")
axs[0][1].axis("tight")
axs[0][2].set_title("xlsqr")
axs[0][2].axis("tight")
axs[1][0].imshow(x[:, nx // 2], cmap="gray", vmin=-1, vmax=1)
axs[1][1].imshow(y[:, nx // 2], cmap="gray", vmin=-1, vmax=1)
axs[1][2].imshow(xlsqr[:, nx // 2], cmap="gray", vmin=-1, vmax=1)
axs[1][0].axis("tight")
axs[1][1].axis("tight")
axs[1][2].axis("tight")
axs[2][0].imshow(x[..., nz // 4], cmap="gray", vmin=-1, vmax=1)
axs[2][1].imshow(y[..., nz // 4], cmap="gray", vmin=-1, vmax=1)
axs[2][2].imshow(xlsqr[..., nz // 4], cmap="gray", vmin=-1, vmax=1)
axs[2][0].axis("tight")
axs[2][1].axis("tight")
axs[2][2].axis("tight")
plt.tight_layout()
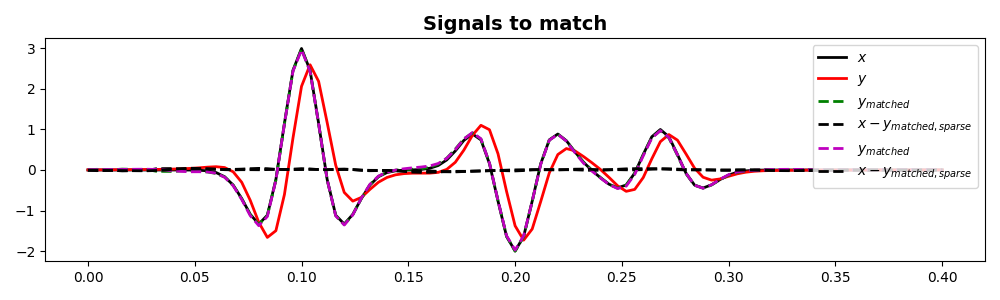
Up until now, we have only considered the case where the filter is compact and much shorter of the input data. There are however scenarios where the opposite (i.e., filter is longer than the signal) is desired. This is for example the case when one wants to estimate a filter (\(\mathbf{h}\)) to match two signals (\(\mathbf{x}\) and \(\mathbf{y}\)):
Such a scenario is very commonly used in so-called adaptive substraction
techniques. We will try now to use pylops.signalprocessing.Convolve1D
to match two signals that have both a phase and amplitude mismatch.
# Define input signal
nt = 101
dt = 0.004
t = np.arange(nt) * dt
x = np.zeros(nt)
x[[int(nt / 4), int(nt / 2), int(2 * nt / 3)]] = [3, -2, 1]
h, th, hcenter = ricker(t[:41], f0=20)
Cop = pylops.signalprocessing.Convolve1D(nt, h=h, offset=hcenter, dtype="float32")
x = Cop * x
# Phase and amplitude corrupt the input
amp = 0.9
phase = 40
y = amp * (
x * np.cos(np.deg2rad(phase))
+ np.imag(sp.signal.hilbert(x)) * np.sin(np.deg2rad(phase))
)
# Define convolution operator
nh = 21
th = np.arange(nh) * dt - dt * nh // 2
Yop = pylops.signalprocessing.Convolve1D(nh, h=y, offset=nh // 2)
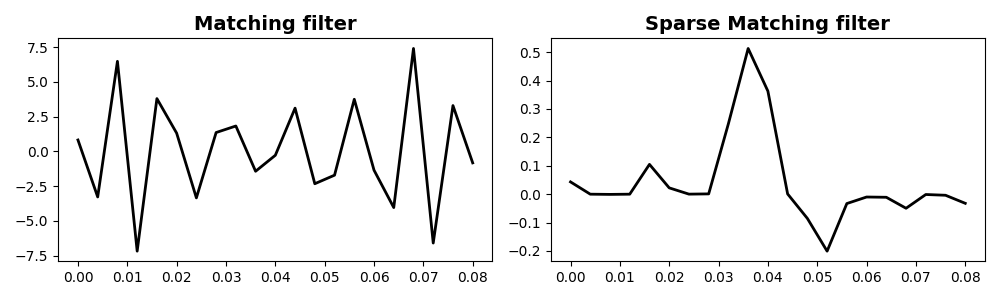
# Find filter to match x to y
h = Yop / x
ymatched = Yop @ h
# Find sparse filter to match x to y
hsparse = pylops.optimization.sparsity.fista(Yop, x, niter=100, eps=1e-1)[0]
ymatchedsparse = Yop @ hsparse
fig, ax = plt.subplots(1, 1, figsize=(10, 3))
ax.plot(t, x, "k", lw=2, label=r"$x$")
ax.plot(t, y, "r", lw=2, label=r"$y$")
ax.plot(t, ymatched, "--g", lw=2, label=r"$y_{matched}$")
ax.plot(t, x - ymatched, "--k", lw=2, label=r"$x-y_{matched,sparse}$")
ax.plot(t, ymatchedsparse, "--m", lw=2, label=r"$y_{matched}$")
ax.plot(t, x - ymatchedsparse, "--k", lw=2, label=r"$x-y_{matched,sparse}$")
ax.set_title("Signals to match", fontsize=14, fontweight="bold")
ax.legend(loc="upper right")
plt.tight_layout()
fig, axs = plt.subplots(1, 2, figsize=(10, 3))
axs[0].plot(th, h, "k", lw=2)
axs[0].set_title("Matching filter", fontsize=14, fontweight="bold")
axs[1].plot(th, hsparse, "k", lw=2)
axs[1].set_title("Sparse Matching filter", fontsize=14, fontweight="bold")
plt.tight_layout()
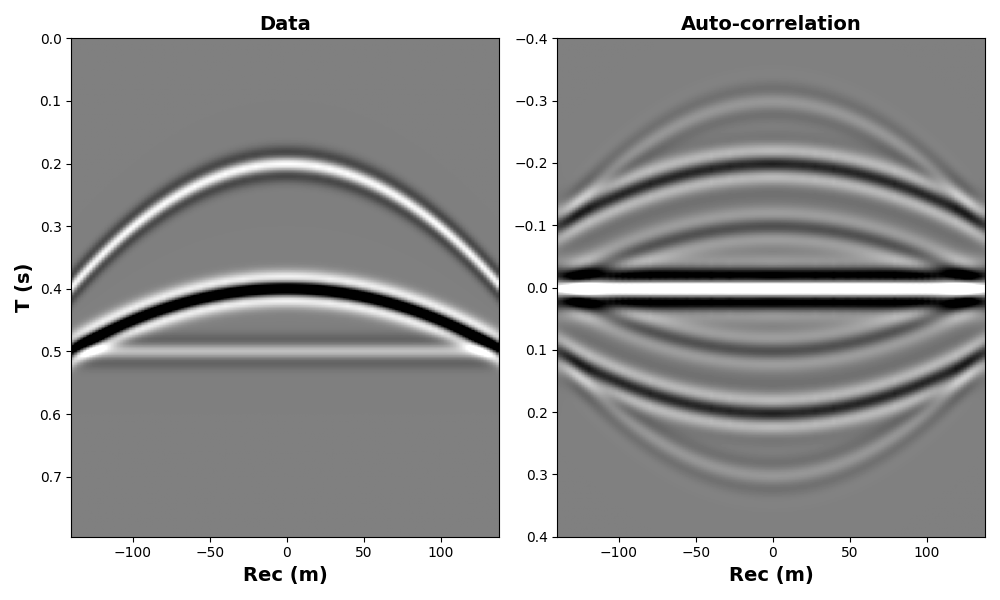
Finally, in some cases one wants to convolve (or correlate) two signals of
the same size. This can also be obtained using
pylops.signalprocessing.Convolve1D. We will see here a case
where the operator is used to trace-wise auto-correlate signals from
a 2-dimensional array representing a seismic dataset.
# Create data
par = {"ox": -140, "dx": 2, "nx": 140, "ot": 0, "dt": 0.004, "nt": 200, "f0": 20}
v = 1500
t0 = [0.2, 0.4, 0.5]
px = [0, 0, 0]
pxx = [1e-5, 5e-6, 1e-20]
amp = [1.0, -2, 0.5]
t, t2, x, y = pylops.utils.seismicevents.makeaxis(par)
wav = pylops.utils.wavelets.ricker(t[:41], f0=par["f0"])[0]
_, data = pylops.utils.seismicevents.parabolic2d(x, t, t0, px, pxx, amp, wav)
# Convolution operator
Xop = pylops.signalprocessing.Convolve1D(
(par["nx"], par["nt"]), h=data, offset=par["nt"] // 2, axis=-1, method="fft"
)
corr = Xop.H @ data
fig, axs = plt.subplots(1, 2, figsize=(10, 6))
axs[0].imshow(data.T, cmap="gray", vmin=-1, vmax=1, extent=(x[0], x[-1], t[-1], t[0]))
axs[0].set_xlabel("Rec (m)", fontsize=14, fontweight="bold")
axs[0].set_ylabel("T (s)", fontsize=14, fontweight="bold")
axs[0].set_title("Data", fontsize=14, fontweight="bold")
axs[0].axis("tight")
axs[1].imshow(
corr.T,
cmap="gray",
vmin=-10,
vmax=10,
extent=(x[0], x[-1], t[par["nt"] // 2], -t[par["nt"] // 2]),
)
axs[1].set_xlabel("Rec (m)", fontsize=14, fontweight="bold")
axs[1].set_title("Auto-correlation", fontsize=14, fontweight="bold")
axs[1].axis("tight")
plt.tight_layout()
Total running time of the script: (0 minutes 2.108 seconds)