Note
Go to the end to download the full example code.
Fourier Transform¶
This example shows how to use the pylops.signalprocessing.FFT,
pylops.signalprocessing.FFT2D
and pylops.signalprocessing.FFTND operators to apply the Fourier
Transform to the model and the inverse Fourier Transform to the data.
import matplotlib.pyplot as plt
import numpy as np
import pylops
plt.close("all")
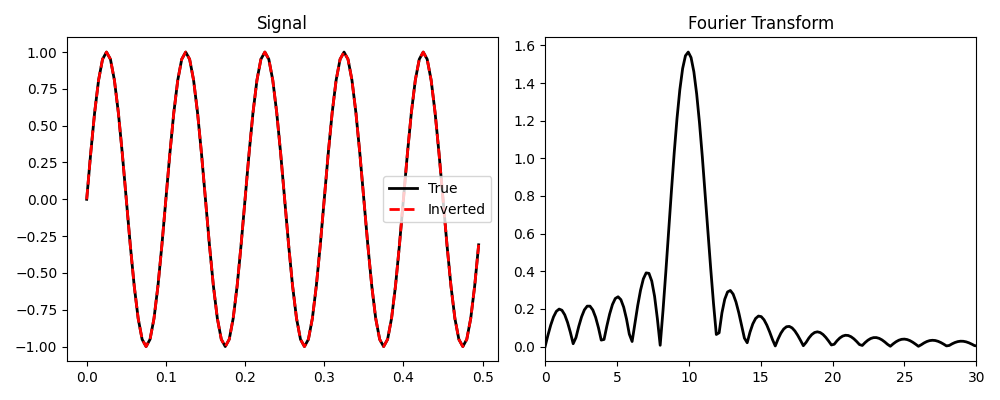
Let’s start by applying the one dimensional FFT to a one dimensional sinusoidal signal \(d(t)=\sin(2 \pi f_0t)\) using a time axis of lenght \(nt\) and sampling \(dt\)
dt = 0.005
nt = 100
t = np.arange(nt) * dt
f0 = 10
nfft = 2**10
d = np.sin(2 * np.pi * f0 * t)
FFTop = pylops.signalprocessing.FFT(dims=nt, nfft=nfft, sampling=dt, engine="numpy")
D = FFTop * d
# Adjoint = inverse for FFT
dinv = FFTop.H * D
dinv = FFTop / D
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].plot(t, d, "k", lw=2, label="True")
axs[0].plot(t, dinv.real, "--r", lw=2, label="Inverted")
axs[0].legend()
axs[0].set_title("Signal")
axs[1].plot(FFTop.f[: int(FFTop.nfft / 2)], np.abs(D[: int(FFTop.nfft / 2)]), "k", lw=2)
axs[1].set_title("Fourier Transform")
axs[1].set_xlim([0, 3 * f0])
plt.tight_layout()
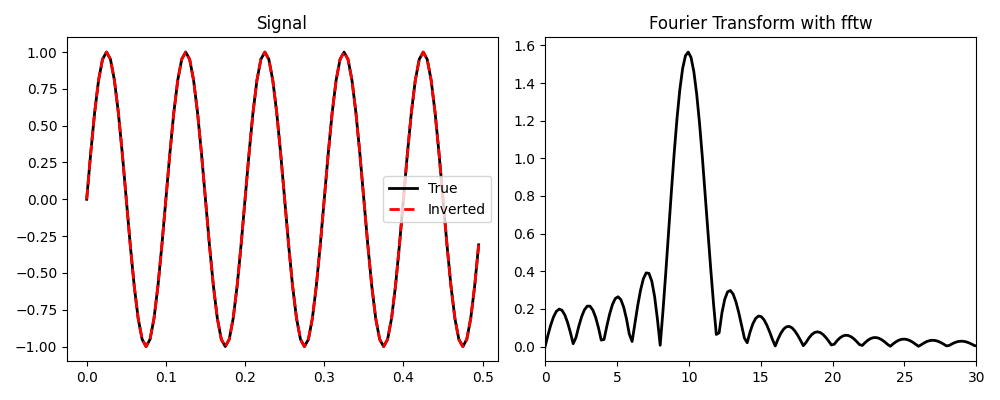
In this example we used numpy as our engine for the fft and ifft.
PyLops implements a second engine (engine='fftw') which uses the
well-known FFTW via the python wrapper
pyfftw.FFTW. This optimized fft tends to outperform the one from
numpy in many cases but it is not inserted in the mandatory requirements of
PyLops. If interested to use FFTW backend, read the fft routines
section at Advanced installation.
FFTop = pylops.signalprocessing.FFT(dims=nt, nfft=nfft, sampling=dt, engine="fftw")
D = FFTop * d
# Adjoint = inverse for FFT
dinv = FFTop.H * D
dinv = FFTop / D
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].plot(t, d, "k", lw=2, label="True")
axs[0].plot(t, dinv.real, "--r", lw=2, label="Inverted")
axs[0].legend()
axs[0].set_title("Signal")
axs[1].plot(FFTop.f[: int(FFTop.nfft / 2)], np.abs(D[: int(FFTop.nfft / 2)]), "k", lw=2)
axs[1].set_title("Fourier Transform with fftw")
axs[1].set_xlim([0, 3 * f0])
plt.tight_layout()
PyLops also has a third FFT engine (engine='mkl_fft') that uses the well-known
Intel MKL FFT. This is a Python wrapper around
the Intel® oneAPI Math Kernel Library (oneMKL)
Fourier Transform functions. It lets PyLops run discrete Fourier transforms faster
by using Intel’s highly optimized math routines.
FFTop = pylops.signalprocessing.FFT(dims=nt, nfft=nfft, sampling=dt, engine="mkl_fft")
D = FFTop * d
# Inverse for FFT
dinv = FFTop.H * D
dinv = FFTop / D
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].plot(t, d, "k", lw=2, label="True")
axs[0].plot(t, dinv.real, "--r", lw=2, label="Inverted")
axs[0].legend()
axs[0].set_title("Signal")
axs[1].plot(FFTop.f[: int(FFTop.nfft / 2)], np.abs(D[: int(FFTop.nfft / 2)]), "k", lw=2)
axs[1].set_title("Fourier Transform with MKL FFT")
axs[1].set_xlim([0, 3 * f0])
plt.tight_layout()
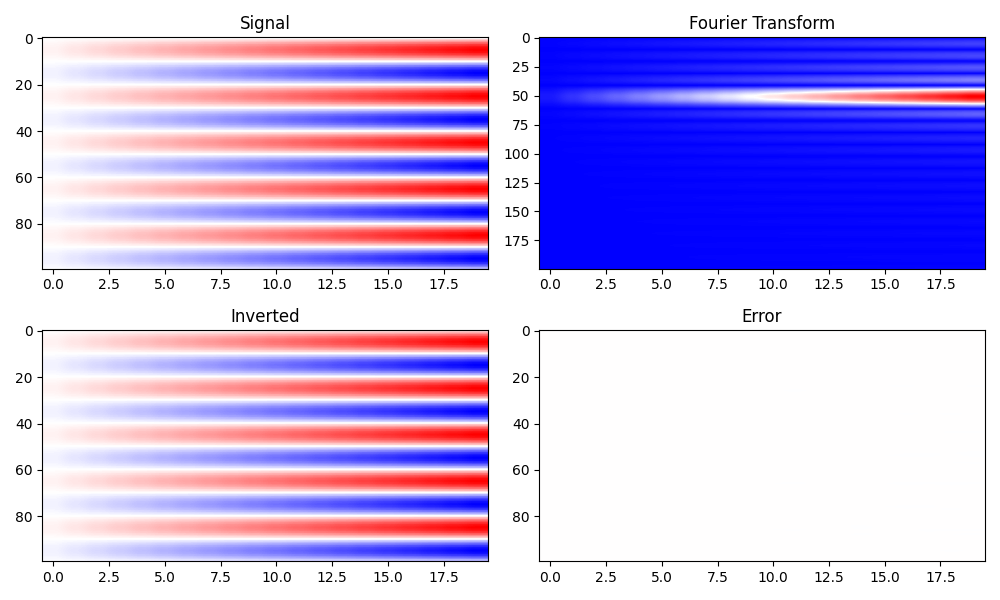
We can also apply the one dimensional FFT to a two-dimensional signal (along one of the first axis)
dt = 0.005
nt, nx = 100, 20
t = np.arange(nt) * dt
f0 = 10
nfft = 2**10
d = np.outer(np.sin(2 * np.pi * f0 * t), np.arange(nx) + 1)
FFTop = pylops.signalprocessing.FFT(dims=(nt, nx), axis=0, nfft=nfft, sampling=dt)
D = FFTop * d.ravel()
# Adjoint = inverse for FFT
dinv = FFTop.H * D
dinv = FFTop / D
dinv = np.real(dinv).reshape(nt, nx)
fig, axs = plt.subplots(2, 2, figsize=(10, 6))
axs[0][0].imshow(d, vmin=-20, vmax=20, cmap="bwr")
axs[0][0].set_title("Signal")
axs[0][0].axis("tight")
axs[0][1].imshow(np.abs(D.reshape(nfft, nx)[:200, :]), cmap="bwr")
axs[0][1].set_title("Fourier Transform")
axs[0][1].axis("tight")
axs[1][0].imshow(dinv, vmin=-20, vmax=20, cmap="bwr")
axs[1][0].set_title("Inverted")
axs[1][0].axis("tight")
axs[1][1].imshow(d - dinv, vmin=-20, vmax=20, cmap="bwr")
axs[1][1].set_title("Error")
axs[1][1].axis("tight")
fig.tight_layout()
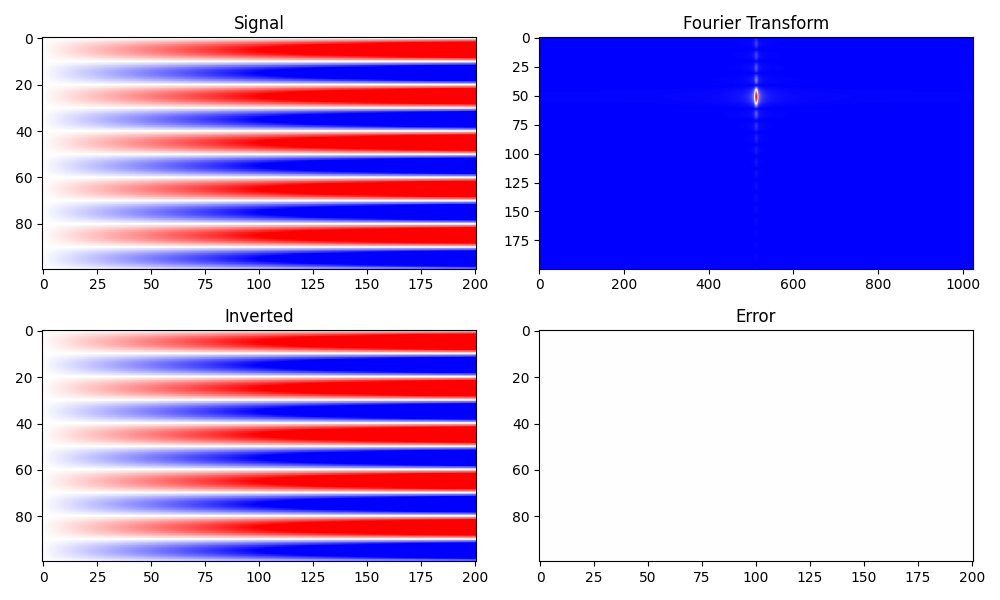
We can also apply the two dimensional FFT to a two-dimensional signal
dt, dx = 0.005, 5
nt, nx = 100, 201
t = np.arange(nt) * dt
x = np.arange(nx) * dx
f0 = 10
nfft = 2**10
d = np.outer(np.sin(2 * np.pi * f0 * t), np.arange(nx) + 1)
FFTop = pylops.signalprocessing.FFT2D(
dims=(nt, nx), nffts=(nfft, nfft), sampling=(dt, dx)
)
D = FFTop * d.ravel()
dinv = FFTop.H * D
dinv = FFTop / D
dinv = np.real(dinv).reshape(nt, nx)
fig, axs = plt.subplots(2, 2, figsize=(10, 6))
axs[0][0].imshow(d, vmin=-100, vmax=100, cmap="bwr")
axs[0][0].set_title("Signal")
axs[0][0].axis("tight")
axs[0][1].imshow(
np.abs(np.fft.fftshift(D.reshape(nfft, nfft), axes=1)[:200, :]), cmap="bwr"
)
axs[0][1].set_title("Fourier Transform")
axs[0][1].axis("tight")
axs[1][0].imshow(dinv, vmin=-100, vmax=100, cmap="bwr")
axs[1][0].set_title("Inverted")
axs[1][0].axis("tight")
axs[1][1].imshow(d - dinv, vmin=-100, vmax=100, cmap="bwr")
axs[1][1].set_title("Error")
axs[1][1].axis("tight")
fig.tight_layout()
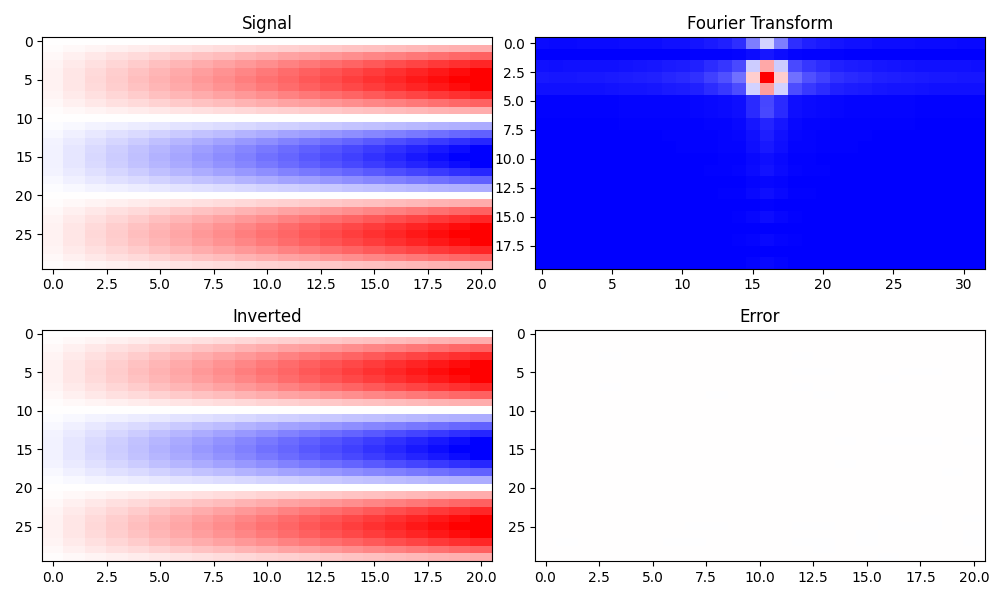
Finally can apply the three dimensional FFT to a three-dimensional signal
dt, dx, dy = 0.005, 5, 3
nt, nx, ny = 30, 21, 11
t = np.arange(nt) * dt
x = np.arange(nx) * dx
y = np.arange(nx) * dy
f0 = 10
nfft = 2**6
nfftk = 2**5
d = np.outer(np.sin(2 * np.pi * f0 * t), np.arange(nx) + 1)
d = np.tile(d[:, :, np.newaxis], [1, 1, ny])
FFTop = pylops.signalprocessing.FFTND(
dims=(nt, nx, ny), nffts=(nfft, nfftk, nfftk), sampling=(dt, dx, dy)
)
D = FFTop * d.ravel()
dinv = FFTop.H * D
dinv = FFTop / D
dinv = np.real(dinv).reshape(nt, nx, ny)
fig, axs = plt.subplots(2, 2, figsize=(10, 6))
axs[0][0].imshow(d[:, :, ny // 2], vmin=-20, vmax=20, cmap="bwr")
axs[0][0].set_title("Signal")
axs[0][0].axis("tight")
axs[0][1].imshow(
np.abs(np.fft.fftshift(D.reshape(nfft, nfftk, nfftk), axes=1)[:20, :, nfftk // 2]),
cmap="bwr",
)
axs[0][1].set_title("Fourier Transform")
axs[0][1].axis("tight")
axs[1][0].imshow(dinv[:, :, ny // 2], vmin=-20, vmax=20, cmap="bwr")
axs[1][0].set_title("Inverted")
axs[1][0].axis("tight")
axs[1][1].imshow(d[:, :, ny // 2] - dinv[:, :, ny // 2], vmin=-20, vmax=20, cmap="bwr")
axs[1][1].set_title("Error")
axs[1][1].axis("tight")
fig.tight_layout()

To conclude, we provide a summary table of the different backends
supported by pylops.signalprocessing.FFT,
pylops.signalprocessing.FFT2D
and pylops.signalprocessing.FFTND operators and
third-party dependencies are required to be able to use them.
Supported Backends¶
Backend |
Supported Dimensions |
Dependency |
|---|---|---|
Numpy/CuPy |
1D, 2D, ND |
|
Scipy |
1D, 2D, ND |
|
FFTW |
1D |
|
MKL |
1D, 2D, ND |
|
Total running time of the script: (0 minutes 1.955 seconds)