Note
Go to the end to download the full example code.
04. Bayesian Inversion¶
This tutorial focuses on Bayesian inversion, a special type of inverse problem that aims at incorporating prior information in terms of model and data probabilities in the inversion process.
In this case we will be dealing with the same problem that we discussed in 03. Solvers, but instead of defining ad-hoc regularization or preconditioning terms we parametrize and model our input signal in the frequency domain in a probabilistic fashion: the central frequency, amplitude and phase of the three sinusoids have gaussian distributions as follows:
where \(f_i \sim N(f_{0,i}, \sigma_{f,i})\), \(a_i \sim N(a_{0,i}, \sigma_{a,i})\), and \(\phi_i \sim N(\phi_{0,i}, \sigma_{\phi,i})\).
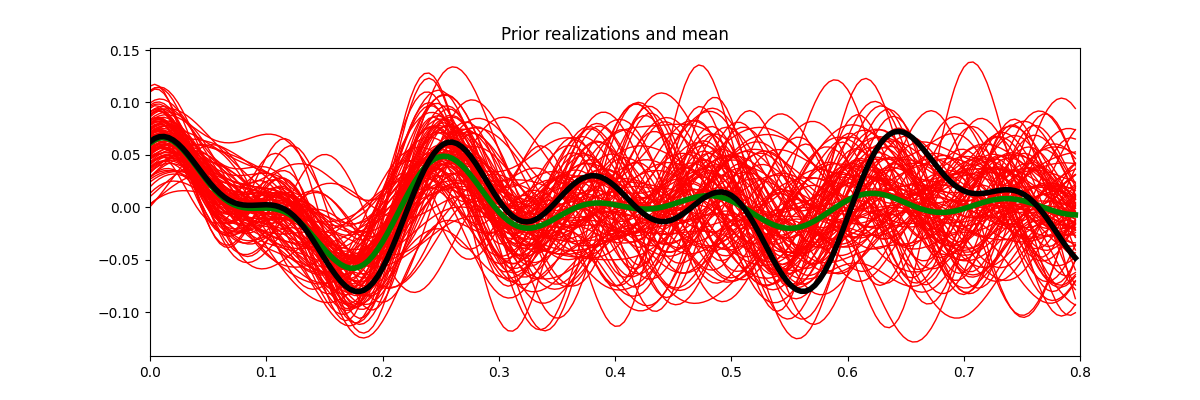
Based on the above definition, we construct some prior models in the frequency domain, convert each of them to the time domain and use such an ensemble to estimate the prior mean \(\mathbf{x}_0\) and model covariance \(\mathbf{C}_{x_0}\).
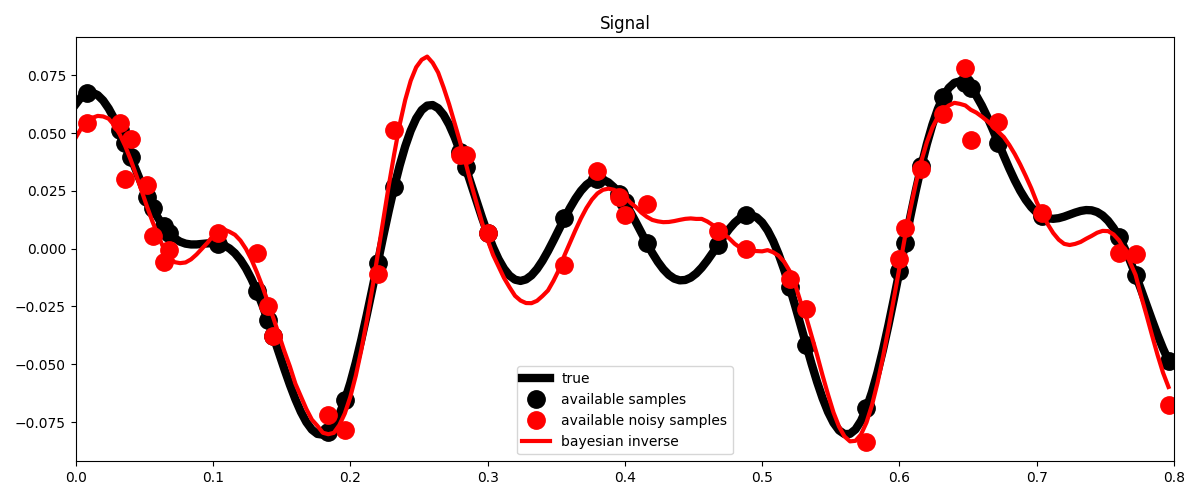
We then create our data by sampling the true signal at certain locations and solve the resconstruction problem within a Bayesian framework. Since we are assuming gaussianity in our priors, the equation to obtain the posterion mean and covariance can be derived analytically:
and
import matplotlib.pyplot as plt
# sphinx_gallery_thumbnail_number = 2
import numpy as np
from scipy.sparse.linalg import lsqr
import pylops
plt.close("all")
np.random.seed(10)
Let’s start by creating our true model and prior realizations
def prior_realization(f0, a0, phi0, sigmaf, sigmaa, sigmaphi, dt, nt, nfft):
"""Create realization from prior mean and std for amplitude, frequency and
phase
"""
f = np.fft.rfftfreq(nfft, dt)
df = f[1] - f[0]
ifreqs = [
int(np.random.normal(f, sigma) / df)
for f, sigma in zip(f0, sigmaf, strict=True)
]
amps = [np.random.normal(a, sigma) for a, sigma in zip(a0, sigmaa, strict=True)]
phis = [
np.random.normal(phi, sigma) for phi, sigma in zip(phi0, sigmaphi, strict=True)
]
# input signal in frequency domain
X = np.zeros(nfft // 2 + 1, dtype="complex128")
X[ifreqs] = (
np.array(amps).squeeze() * np.exp(1j * np.deg2rad(np.array(phis))).squeeze()
)
# input signal in time domain
FFTop = pylops.signalprocessing.FFT(nt, nfft=nfft, real=True)
x = FFTop.H * X
return x
# Priors
nreals = 100
f0 = [5, 3, 8]
sigmaf = [0.5, 1.0, 0.6]
a0 = [1.0, 1.0, 1.0]
sigmaa = [0.1, 0.5, 0.6]
phi0 = [-90.0, 0.0, 0.0]
sigmaphi = [0.1, 0.2, 0.4]
sigmad = 1
scaling = 100 # Scale by a factor to allow noise std=1
# Prior models
nt = 200
nfft = 2**11
dt = 0.004
t = np.arange(nt) * dt
xs = scaling * np.array(
[
prior_realization(f0, a0, phi0, sigmaf, sigmaa, sigmaphi, dt, nt, nfft)
for _ in range(nreals)
]
)
# True model (taken as one possible realization)
x = scaling * prior_realization(
f0, a0, phi0, [0, 0, 0], [0, 0, 0], [0, 0, 0], dt, nt, nfft
)
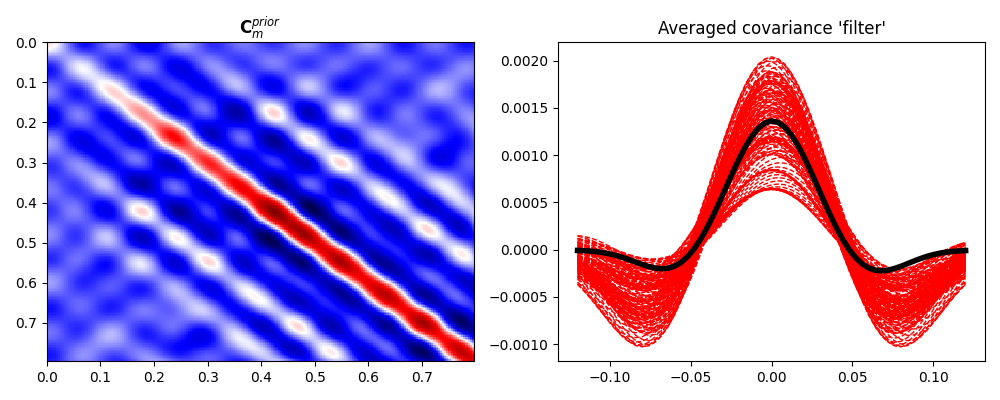
We have now a set of prior models in time domain. We can easily use sample statistics to estimate the prior mean and covariance. For the covariance, we perform a second step where we average values around the main diagonal for each row and find a smooth, compact filter that we use to define a convolution linear operator that mimics the action of the covariance matrix on a vector
x0 = np.average(xs, axis=0)
Cm = ((xs - x0).T @ (xs - x0)) / nreals
N = 30 # lenght of decorrelation
diags = np.array([Cm[i, i - N : i + N + 1] for i in range(N, nt - N)])
diag_ave = np.average(diags, axis=0)
# add a taper at the start and end to avoid edge effects
diag_ave *= np.hamming(2 * N + 1)
fig, ax = plt.subplots(1, 1, figsize=(12, 4))
ax.plot(t, xs.T, "r", lw=1)
ax.plot(t, x0, "g", lw=4)
ax.plot(t, x, "k", lw=4)
ax.set_title("Prior realizations and mean")
ax.set_xlim(0, 0.8)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 4))
im = ax1.imshow(
Cm, interpolation="nearest", cmap="seismic", extent=(t[0], t[-1], t[-1], t[0])
)
ax1.set_title(r"$\mathbf{C}_m^{prior}$")
ax1.axis("tight")
ax2.plot(np.arange(-N, N + 1) * dt, diags.T, "--r", lw=1)
ax2.plot(np.arange(-N, N + 1) * dt, diag_ave, "k", lw=4)
ax2.set_title("Averaged covariance 'filter'")
plt.tight_layout()
Let’s define now the sampling operator as well as create our covariance matrices in terms of linear operators. This may not be strictly necessary here but shows how even Bayesian-type of inversion can very easily scale to large model and data spaces.
# Sampling operator
perc_subsampling = 0.2
ntsub = int(np.round(nt * perc_subsampling))
iava = np.sort(np.random.permutation(np.arange(nt))[:ntsub])
iava[-1] = nt - 1 # assume we have the last sample to avoid instability
Rop = pylops.Restriction(nt, iava, dtype="float64")
# Covariance operators
Cm_op = pylops.signalprocessing.Convolve1D(nt, diag_ave, offset=N)
Cd_op = sigmad**2 * pylops.Identity(ntsub)
We model now our data and add noise that respects our prior definition
First, since the problem is rather small, we construct the dense version of all our matrices and we compute the analytical posterior mean and covariance
Cm = Cm_op.todense()
Cd = Cd_op.todense()
R = Rop.todense()
# Bayesian analytical solution
xpost_ana = x0 + Cm @ R.T @ (np.linalg.solve(R @ Cm @ R.T + Cd, yn - R @ x0))
Cmpost_ana = Cm - Cm @ R.T @ (np.linalg.solve(R @ Cm @ R.T + Cd, R @ Cm))
Next we solve the same Bayesian inversion equation iteratively. We will see that provided we use enough iterations we can retrieve the same values of the analytical posterior mean
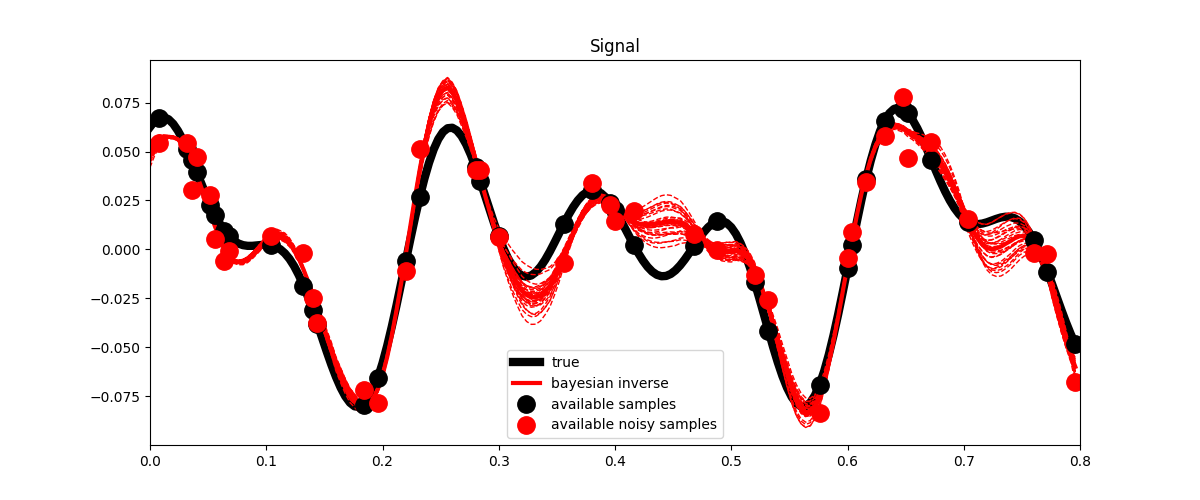
But what is the problem did not allow creating dense matrices for both the operator and the input covariance matrices. In this case, we can resort to the Randomize-Then-Optimize algorithm of Bardsley et al., 2014, which simply solves the same problem that we solved to find the MAP solution repeatedly by adding random noise to the data. It can be shown that the sample mean and covariance of the solutions of the different perturbed problems provide a good approximation for the true posterior mean and covariance.
# RTO number of solutions
nreals = 1000
xrto = []
for _ in range(nreals):
yreal = yn + Rop * np.random.normal(0, sigmad, nt)
xrto.append(
x0
+ Cm_op
* Rop.H
* (lsqr(Rop * Cm_op * Rop.H + Cd_op, yreal - Rop * x0, iter_lim=400))[0]
)
xrto = np.array(xrto)
xpost_rto = np.average(xrto, axis=0)
Cmpost_rto = ((xrto - xpost_rto).T @ (xrto - xpost_rto)) / nreals
Finally we visualize the different results
# Means
fig, ax = plt.subplots(1, 1, figsize=(12, 5))
ax.plot(t, x, "k", lw=6, label="true")
ax.plot(t, xpost_ana, "r", lw=7, label="bayesian inverse (ana)")
ax.plot(t, xpost_iter, "g", lw=5, label="bayesian inverse (iter)")
ax.plot(t, xpost_rto, "b", lw=3, label="bayesian inverse (rto)")
ax.plot(t, ymask, ".k", ms=25, label="available samples")
ax.plot(t, ynmask, ".r", ms=25, label="available noisy samples")
ax.legend()
ax.set_title("Mean reconstruction")
ax.set_xlim(0, 0.8)
# RTO realizations
fig, ax = plt.subplots(1, 1, figsize=(12, 5))
ax.plot(t, x, "k", lw=6, label="true")
ax.plot(t, xrto[::10].T, "--b", lw=0.5)
ax.plot(t, xpost_rto, "b", lw=3, label="bayesian inverse (rto)")
ax.plot(t, ymask, ".k", ms=25, label="available samples")
ax.plot(t, ynmask, ".r", ms=25, label="available noisy samples")
ax.legend()
ax.set_title("RTO realizations")
ax.set_xlim(0, 0.8)
# Covariances
fig, axs = plt.subplots(1, 2, figsize=(12, 4))
axs[0].imshow(
Cmpost_ana,
interpolation="nearest",
cmap="seismic",
vmin=-5e-1,
vmax=2,
extent=(t[0], t[-1], t[-1], t[0]),
)
axs[0].set_title(r"$\mathbf{C}_m^{post,ANA}$")
axs[0].axis("tight")
axs[1].imshow(
Cmpost_rto,
interpolation="nearest",
cmap="seismic",
vmin=-5e-1,
vmax=2,
extent=(t[0], t[-1], t[-1], t[0]),
)
axs[1].set_title(r"$\mathbf{C}_m^{post,RTO}$")
axs[1].axis("tight")
plt.tight_layout()
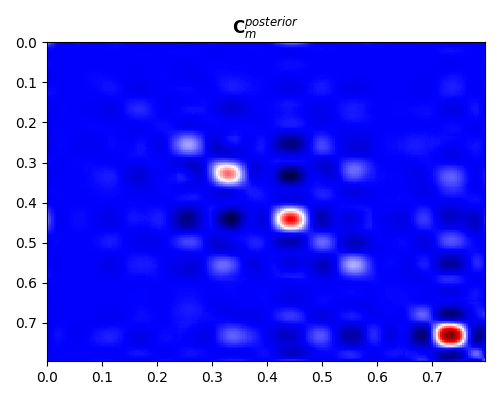
Note that here we have been able to compute a sample posterior covariance from its estimated samples. By displaying it we can see how both the overall variances and the correlation between different parameters have become narrower compared to their prior counterparts. Moreover, whilst the RTO covariance seems to be slightly under-estimated, this represents an appealing alternative to the closed-form solution for large-scale problems under Gaussian assumptions.
Total running time of the script: (0 minutes 8.452 seconds)